
Home
Luận văn - báo cáo
Khoa học tự nhiên
Đồ án tốt nghiệp: Những kiến thức cơ bản về robot - nghiên cứu, thiết kế robot điều khiển bằng tay
Đồ án tốt nghiệp: Những kiến thức cơ bản về robot - nghiên cứu, thiết kế robot điều khiển bằng tay

Đồ án tốt nghiệp
Đề Tài:
Thiết kế, chế tạo robot điều khiển
bằng tay
LỜI NÓI ĐẦU
Vào những năm đầu thế kỷ 20, “robot” là một khái niệm hết sức mới mẻ. Thuật ngữ
“robot” xuất hiện đầu tiên trong một vở kịch khi tác giả mô tả về những cỗ máy có khả
năng làm việc thay thế con người. Trải qua nhiều giai đoạn phát triển, ngày nay, hình ảnh
của những chú robot đã trở nên quen thuộc và gần gũi với chúng ta hơn bao giờ hết.
Gọi là “chú robot”, chúng ta dễ liên tưởng đến những “con người được làm bằng
máy”. Điều này chỉ đúng ở giai đoạn sơ khai khi khái niệm robot vừa mới ra đời bởi các
nhà phát minh hầu như chỉ hướng đến những robot mang dáng dấp con người. Kết quả
là họ cho ra đời những chú robot giống người và có thể thực hiện những động tác đơn
giản. Điểm hạn chế của những robot này là không được thông minh và cũng không được
ứng dụng nhiều. càng về sau, con người càng trở nên thực tế hơn. Họ không đặt nặng
vấn đề hình dáng nữa. họ cần những robot có thể thực thi một công việc rõ rệt. Chính vì
vậy, đa số những robot ngày nay chỉ mang hình dạng một bộ phận nào đó của con người
hoặc thậm chí hoàn toàn không giống con người.
Trong xu hướng phát triển kỹ thuật hiện nay, là người hoạt động trong lĩnh vực
Cơ điện tử, những kiến thức cơ bản về robot là hoàn toàn cần thiết. Với suy nghĩ trên,
cùng với niềm yêu thích robot,chúng em cảm thấy thật thú vị khi thực hiện đề tài “Thiết
kế, chế tạo robot điều khiển bằng tay”.
Chúng em xin chân thành cảm ơn các thầy cô giáo trong bộ môn Cơ Điện Tử khoa
Cơ khí đã giảng dạy cho chúng em những kiến thức về chuyên môn, định hướng sự hiểu
biết cũng như khả năng để chúng em thực hiện tốt đồ án tốt nghiệp và tạo điều kiện
thuận lợi cho chúng em hoàn thành tốt nhiệm vụ.
Chúng em xin chân thành cảm ơn ! Các thầy cô đã tận tình hướng dẫn giúp đỡ em
hoàn thành đồ án này!
Chúng em xin chân thành cảm
ơn!
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..........................................................................................................................................
Hưng Yên, ngày .... tháng .... năm 2011.
Giáo viên hướng dẫn
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
..............................................................................................................................................
Hưng Yên, ngày .... tháng .... năm 2011.
Giáo viên phản biện

MỤC LỤC
1.1. CHỦ ĐỀ VÀ LUẬT CHƠI ..................................................................................... 8
1.1.1. Chủ đề của cuộc thi ........................................................................................ 8
1.1.2. Luật thi đấu ................................................................................................... 10
Hình 1.4:Kích thước các Joss Sticks ( nén nhang) .................................................. 13
1.2.2.Những giải pháp thực hiện chế tạo Robot. ...................................................... 13
1.2.2.1.Hướng thực hiện thiết kế:........................................................................13
1.2.2.2. Những giải pháp về thiết kế cơ khí. ............................................................ 14
1.2.3.Những giải pháp thiết kế mạch điện. ............................................................... 14
1.2.3.1.Yêu cầu về động cơ:...................................................................................14
2.1.TÍNH TOÁN VÀ LỰA CHỌN LẮP RÁP ROBOT........................................16
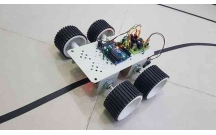
Hình 2.1.Robot bằng tay ......................................................................................... 16
2.1.1.Kích thước phần đế. ......................................................................................... 16
2.1.2. Vật liệu sử dụng làm đế. .................................................................................. 17
Loại nhôm được sử dụng làm đế robot là loại nhôm ống hình chữ nhật có kích
thước 50×25mm và nhôm ống có đường kính 18. .................................................... 17
2.2.BÀI TOÁN ĐỘNG HỌC TAY MÁY CỦA ROBOT. ......................................... 20
2.2.1. Phương trình động học thuận: ....................................................................... 20
Hình 2.6:Kết cấu của robot ..................................................................................... 21
Kết luận :Từ phương trình động học thuận sẽ xác định được tọa độ điểm 02 trên
cánh tay dịch chuyển theo trục y một đoạn l2, dich chuyển theo trục z một đoạn l1.
22
2.2.2: Phương trình động học ngược ....................................................................... 22
Hình 2.7: Cách thức truyền động cho robot .............................................................. 24
Hình 2.8: Buli nối vào đầu trục động cơ ..................................................................... 24
24
Hình.2.9: Puli trung gian(giảm tốc) ............................................................................ 24
Hình 2.10: Dây đai nối buli với bánh robot ............................................................... 25
Hình 2.11: cách bắt động cơ cho bánh sau ............................................................. 25
2.3.2.Chọn bánh trước và cách lắp: .......................................................................... 26
2.3.3. Thiết kế phần trụ cho robot. ............................................................................ 27
Hình 2.16:kích thước trụ................................................28

Hình 2.17: Puli trượt ................................................................................................. 29
2.3.5. Thiết kế tay xúc quà. ....................................................................................... 29
Hình 1.18: Kích thước tay xúc quà ......................................................................... 30
Hình 2.19:kích thước cánh tay ................................................................................ 30
PHẦN 3: THIẾT KẾ MẠCH ĐIỆN ........................................................................... 36
Hình 3.1: Sơ đồ khối mạch điều khiển. ................................................................... 36
Hình 3.6. Khi thay đổi duty cycle, ta sẽ có điện áp trung bình thay đổi .................. 41
Hình 3.7. minh họa giải thuật phương pháp điều biến độ rộng xung ...................... 42
3.1.5.2.Van bán dẫn IRF 540N...........................................................................46
3.1.5.4.Opto PC817...........................................................................................48
3.2.3 Sơ đồ chân và chức năng các chân P89V51RD2 ............................................ 50
3.2.3.1. Sơ đồ chân P89V51RD2 ............................................................................. 50
Hình 3.13. Sơ đồ chân IC P89V51RD2 ................................................................... 50
3.4. PHƯƠNG PHÁP ĐIỀU CHẾ ĐỘ RỘNG XUNG .............................................. 52
Hình 3.18 Sơ đồ mạch vi điều khiển ........................................................................ 57
3.6. KHỐI PHÍM BẤM ............................................................................................... 59
Hình 3.19. Gampad ................................................................................................. 59
3.7.1.1. IC LM7805.........................................................................................60
3.7.1.2. B688. .......................................................................................................... 61
Hình 3.21. Sơ đồ chân của TIP B688. ..................................................................... 61
Bảng 3.8: Bảng thông số của B688 .............................................................................. 61
-Nguồn động lực...................................................................................................63
3.8: SƠ ĐỒ NGUYÊN LÝ CỦA MẠCH ROBOT. ................................................... 64
Hình 3.24: Mạch sơ đồ nguyên lý ........................................................................... 65
Hình 4.1. Lưu đồ giải thuật đi thẳng ....................................................................... 66
Hình 4.2. Lưu đồ giải thuật đi lùi ............................................................................ 66
Hình 4.3. Lưu đồ giải thuật rẽ phải ......................................................................... 67
Hình 4.4 Lưu đồ giải thuật rẽ trái ........................................................................... 67
Hình 4.5. Lưu đồ giải thuật nâng ............................................................................ 68
Hình 4.6. Lưu đồ giải thuật hạ ................................................................................ 68
4.2.CHƯƠNG TRÌNH ĐIỀU KHIỂN. ....................................................................... 69
4.3. PHƯƠNG ÁN XỬ LÝ NHIỄU ............................................................................ 79
4.3.1. Các nguyên nhân cơ bản gây ra nhiễu ........................................................... 79
4.3.1.1. Nguyên nhân cơ khí:.................................................................................79
4.3.1.2. Nguyên nhân do điện: ................................................................................ 79
4.3.2. Các phương án xử lý nhiễu. ............................................................................ 81
4.3.2.1. Xử lý cơ khí: ...................................................................................................... 81

có thể bạn quan tâm
Nghiên cứu Robot dò line
28
1.164
721
Kỹ thuật
28
(New)

Nghiên cứu và xây dựng Robot di động bám tường
62
830
300
Khoa học tự nhiên
62
(New)
Giới thiệu hệ thống điều khiển từ xa, điều khiển từ xa bằng tia hồng n...
80
1.019
361
Kỹ thuật
80
(New)

Vi điều khiển ATMEGA8- mô hình điều khiển động cơ DC servo bằng vi đi...
85
1.167
658
Kỹ thuật
85
(New)
Bộ điều khiển và các luật điều khiển và thiết kế và lắp ráp bộ điều ch...
60
863
392
Kỹ thuật
60
(New)
Thiết kế mạch điều khiển nhiệt độ cho tủ sấy bằng điện trở
94
1.538
854
Kỹ thuật
94
(New)

Nghiên cứu điều khiển thiết bị cháy và báo trộm qua mạng điện thoại
86
884
389
Kỹ thuật
86
(New)

Các tính năng của Vi xử lý và vi điều khiển cũng như các họ IC giao ti...
100
1.169
392
Kỹ thuật
100
(New)
thông tin tài liệu
Loy Krathong là một lễ hội truyền thống của người Thái để tôn vinh Nữ thần của dòng sông. Các hoạt động sôi động được tổ chức tại Thái Lan vào đêm trăng tròn trong tháng mười một hằng năm. Một "Krathong" là một con thuyền nhỏ thường được làm bằng thân cây chuối cắt và lá.
Một số thành phần của truyền thống Loy Krathong sẽ được điều chỉnh cho các chức năng của robot tạo ra một thách thức thực sự cho những thí sinh trẻ sáng tạo và không ngừng đổi mới. Tất cả các thí sinh sẽ thể hiện đầy đủ các khả năng của mình phù hợp với mục tiêu chính của sự kiện này đó là: "Một người tự chiến thắng chính bản thân mình và chiến thắng cả những người khác đó chính là người chiến thắng tuyệt đối."
Mở rộng để xem thêm
tài liệu mới trong mục này
Tạo chủng Rhodococcus opacus B4 có biểu hiện của enzyme n- alkane monooxygenase tăng so với dòng chƣa biến nạp, bằng cách tạo plasmid chứa gene alkB1/alkB2 rồi chuyển plasmid đó vào R. opacus B4
Khảo sát tỉ lệ nhiễm Coliforms và E. coli trong nƣớc uống, nước giải khát có gas, nước uống có cồn đang lƣu hành trên địa bàn Thành phố Hồ Chí Minh.
Sản xuất được chế phẩm diệt ruồi hiệu quả mà không gây độc đối với con ngƣời và thân thiện với môi trường
Nghiên cứu mới để bảo vệ vi khuẩn probiotic và nâng cao giá trị của sữa chua về chỉ tiêu vi sinh vật.
Sản xuất kháng thể thỏ kháng ovalbumin và tinh chế kháng thể (IgG) kháng ovalbumin
tài liệu hot trong mục này
Tiểu luận: Chân dung, hình ảnh nhận thức khi tới thăm bảo tàng chứng tích chiến tranh
Tiểu luận: Nem chua và các yếu tố cấu thành lên nem chua
ÁP DỤNG KĨ THUẬT REAL-TIME PCR SỬ DỤNG DISPLACING PROBE ĐỂ CHẨN ĐOÁN VIRUS HBV KHÁNG THUỐC LAMUVIDINE Ở BỆNH NHÂN VIÊM GAN SIÊU VI B
Tổng quan về nguyên liệu tôm, tôm chua
NGHIÊN CỨU VẮC-XIN PHÒNG BỆNH THAN DO VI KHUẨN Bacillus anthracis
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!
xem nhiều trong tuần
Địa lý 12 Phát triển cây công nghiệp lâu năm Tây Nguyên
Đề thi và lời giải môn xác suất thống kê của trường Học viện ngân hàng
Giáo trình Quản trị học của Đại học kinh tế quốc dân
MẪU GIẤY THI A4
MẪU GIỚI THIỆU CHUYỂN SINH HOẠT HỘI
Bài tập ôn tập cuối tuần lớp 2: Tuần 31
yêu cầu tài liệu
Giúp bạn tìm tài liệu chưa có

×
