
Home
Luận văn - báo cáo
Thạc sĩ cao học
Luận văn thạc sỹ: ĐH Thái Nguyên- Lộ trình cho Robot và bài toán xác định lộ trình qua ứng dụng mạng Nơron
Luận văn thạc sỹ: ĐH Thái Nguyên- Lộ trình cho Robot và bài toán xác định lộ trình qua ứng dụng mạng Nơron

ĐẠI HỌC THÁI NGUYÊN
KHOA CÔNG NGHỆ THÔNG TIN
-----------------------------------
ĐINH THỊ THUÝ QUỲNH
ỨNG DỤNG MẠNG NƠRON TRONG BÀI
TOÁN XÁC ĐỊNH LỘ TRÌNH CHO ROBOT
LUẬN VĂN THẠC SĨ CÔNG NGHỆ THÔNG TIN
THÁI NGUYÊN - 2008

ĐẠI HỌC THÁI NGUYÊN
KHOA CÔNG NGHỆ THÔNG TIN
-----------------------------------
ĐINH THỊ THUÝ QUỲNH
ỨNG DỤNG MẠNG NƠRON TRONG BÀI
TOÁN XÁC ĐỊNH LỘ TRÌNH CHO ROBOT
Chuyên ngành: Khoa học máy tính
Mã số: 60.48.01
LUẬN VĂN THẠC SĨ CÔNG NGHỆ THÔNG TIN
NGƯỜI HƯỚNG DẪN KHOA HỌC:
PGS – TS ĐẶNG QUANG Á
THÁI NGUYÊN - 2008
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên http://www.lrc-tnu.edu.vn
1
MỤC LỤC
MỤC LỤC
1
DANH MỤC HÌNH
4
LỜI NÓI ĐẦU
6
CHƢƠNG 1 TỔNG QUAN MẠNG NƠRON NHÂN TẠO............................
8
1.1. Giới thiệu mạng nơron..........................................................
8
1.1.1. Những kiến trúc tính toán.............................................
8
1.1.2. Lịch sử phát triển của mạng nơron...............................
9
1.1.3. Nơron sinh học..............................................................
11
1.1.4. Nơron nhân tạo..............................................................
12
1.1.5. Mạng nơron nhân tạo....................................................
14
1.1.6. Tiếp cận nơron trong tính toán......................................
18
1.2. Phạm vi ứng dụng của mạng nơron....................................
22
1.2.1. Những bài toán thích hợp..............................................
22
1.2.2. Các lĩnh vực ứng dụng của mạng nơron.......................
24
1.2.3. Ƣu nhƣợc điểm của mạng nơron..................................
25
1.3. Mạng Hopfield.......................................................................
26
1.3.1. Mạng Hopfield rời rạc...................................................
28
1.3.2. Mạng Hopfiel liên tục...................................................
28
1.4. Mạng nơron trong kỹ thuật robot.......................................
29
1.5. Nhận xét.................................................................................
30
CHƢƠNG 2 GIỚI THIỆU BÀI TOÁN LẬP LỘ TRÌNH CHO ROBOT............
32
2.1. Giới thiệu robot nhân tạo.....................................................
32
2.1.1. Tổng quan.....................................................................
32
2.1.2. Giải pháp thiết kế..........................................................
33
2.2. Bài toán lập lộ trình..............................................................
34
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên http://www.lrc-tnu.edu.vn
2
2.2.1. Mở đầu..........................................................................
34
2.2.2. Các ví dụ thực tế...........................................................
37
2.2.3. Bài toán lập lộ trình chuyển động cho robot................
39
2.3. Các thành phần cơ bản của việc lập lộ trình........................
40
2.3.1. Trạng thái........................................................................
40
2.3.2. Thời gian.........................................................................
40
2.3.3. Hành động.......................................................................
41
2.3.4. Trạng thái đầu và trạng thái kết thúc..............................
41
2.3.5. Tiêu chuẩn......................................................................
41
2.3.6. Giải thuật........................................................................
42
2.3.7. Ngƣời lập lộ trình............................................................
42
2.3.8. Lộ trình...........................................................................
42
2.3.9. Lập lộ trình chuyển động................................................
46
2.4. Không gian cấu hình...............................................................
46
2.4.1. Các khái niệm không gian cấu hình................................
46
2.4.2. Mô hình cấu hình............................................................
47
2.4.3. Không gian cấu hình chƣớng ngại..................................
56
2.4.4. Định nghĩa chính xác về vấn đề lập lộ trình...................
58
CHƢƠNG 3 ỨNG DỤNG MẠNG NƠRON NHÂN TẠO TRONG BÀI TOÁN
LẬP LỘ TRÌNH CHO ROBOT.....................................................................
60
3.1. Mạng nơron nhân tạo và bài toán lập lộ trình......................
60
3.2. Ứng dụng mạng Hopfield giải bài toán lập lộ trình .............
62
3.2.1. Khái quát một số phƣơng pháp lập lộ trình.....................
62
3.2.2. Phƣơng pháp do Yang và Meng đề xuất..........................
63
3.2.3. Mô hình Yang và Meng cải tiến......................................
67
3.3. Các kết quả thử nghiệm..........................................................
69
3.3.1. Chƣơng trình Đềmô.........................................................
69
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên http://www.lrc-tnu.edu.vn
3
3.3.2. So sánh các kết quả..........................................................
71
3.3.3. Kết luận............................................................................
73
KẾT LUẬN...............................................................................................
75
TÀI LIỆU THAM KHẢO............................................................................
76
PHỤ LỤC..................................................................................................
77
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên http://www.lrc-tnu.edu.vn
4
DANH MỤC HÌNH
Hình 1.1: Mô hình nơron sinh học..............................................................
11
Hình 1.2: Mô hình một nơron nhân tạo......................................................
14
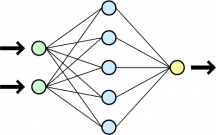
Hình 1.3: Mô hình mạng truyền thẳng 1 lớp..............................................
16
Hình 1.4: Mô hình mạng truyền thẳng nhiều lớp.......................................
17
Hình 1.5: Mạnh hồi quy 1 lớp có nối ngƣợc..............................................
17
Hình 1.6: Mạnh hồi quy nhiều lớp có nối ngƣợc.......................................
18
Hình 1.7: Mô hình mạng Hopfield.............................................................
27
Hình 2.1: Các thành phần cấu thành Robot................................................
34
Hình 2.2: Khối Rubitc (a); bài toán dịch chuyển số (b).............................
36
Hình 2.3: Giải thuật kéo 2 thanh thép tách ra.............................................
37
Hình 2.4: Sử dụng Robot di động để di chuyển Piano...............................
38
Hình 2.5: (a) ngƣời lập lộ trình thiết kế giải thuật lập lộ trình...................
(b) Ngƣời lập lộ trình thiết kế toàn bộ máy ...............................
43
43
Hình 2.6: Một số lộ trình và sự cải tiến lộ trình.........................................
44
Hình 2.7: Mô hình có thứ bậc 1 máy có thể chứa đựng 1 máy khác..........
45
Hình 2.8: Không gian cấu hình...................................................................
47
Hình 2.9: Một Robot điểm di chuyển trong không gian 2D, C – Space là
R2................................................................................................................
48
Hình 2.10: Một Robot điểm di chuyển trong không gian 3D, C – Space
là R3............................................................................................................
48
Hình 2.11: Một đa thức lồi có thể đƣợc xác định bởi phép giao của các
nửa mặt phẳng.............................................................................................
49
Hình 2.12: Dấu hiệu của f(x,y) phân chia R2 thành 3 vùng: f(x,y) <0,
f(x,y) >0, f(x,y) =0......................................................................................
50
Hình 2.13: (a)Đa diện. (b)Biểu diễn các cạnh của một mạt trong đa diện
53

có thể bạn quan tâm
Luận văn thạc sĩ: Tổng quan về mạng NƠRON nhân tạo và ứng dụng nó vào...
88
1.461
499
Khoa học tự nhiên
88
(New)
Trình bày tổng quan về cơ sở của mạng nơron nhân tạo, và nêu khái quát...
88
1.304
438
Kinh tế quản lý
88
(New)
Luận văn thạc sỹ: Nông thôn huyện Định Hóa, Thái Nguyên và sự phát tri...
148
1.235
361
Thạc sĩ cao học
148
(New)
Khóa luận: ĐH Quốc gia HN- mạng Nơron RBF và thuật toán HDH huấn luyện...
50
1.212
421
Kỹ thuật
50
(New)

Tham khảo giáo trình nguyên lý kế toán của Đại học Thái Nguyên
242
1.211
543
Bài giảng, giáo trình
242
(New)

Luận văn thạc sĩ khoa học: Bài toán thỏa mãn ràng buộc, lập trình Logi...
120
1.046
606
Thạc sĩ cao học
120
(New)

Luận văn thạc sĩ khoa máy tính: Nghiên cứu một số kỹ thuật mật mã ứng...
25
1.018
532
Thạc sĩ cao học
25
(New)

Khóa luận: Quy trình xử lý những công trình xây dựng sai quy định tại...
76
1.103
464
Kinh tế - Thương mại
76
(New)
thông tin tài liệu
Khái niệm tính toán có thể được hiểu theo nhiều cách. Trƣớc đây, việc tính toán bị ảnh hưởng bởi quan niệm tính toán theo chương trình (Programed computing). Theo quan điểm này, để giải quyết bài toán thì bước đầu tiên ta cần thiết kế giải thuật sau đó cài đặt giải thuật đó trên cấu trúc hiện hành có ưu thế nhất.
Mở rộng để xem thêm
tài liệu mới trong mục này
Giới thiệu chung về bảo mật vô tuyến- Kiến trúc bảo mật mạng GSM và Kiến trúc bảo mật mạng GSM
Tổng quan về cân bằng nước hệ thống và mô hình IQQM, áp dụng mô hình IQQM tính toán cân bằng nước hệ thống Tổng quan về cân bằng nước hệ thống và mô hình IQQM, áp dụng mô hình IQQM tính toán cân bằng nước hệ thống lưu vực sông Kiến Giang, Quảng Bình
Xây dựng cơ sở dữ liệu về đặc trưng lâm học của một số ưu hợp thực vật ưu thế cây họ Sao – Dầu ở Đồng Nai để làm căn cứ xây dựng những biện pháp khai thác – tái sinh, nuôi dưỡng và bảo tồn những hệ sinh thái rừng ưu thế cây họ Sao – Dầu ở Đông Nam Bộ
So sánh một số yếu tố môi trường nước trong quầng nuôi tôm có trồng Rau nhút và tôm có chất chà ở xã Bình Thạnh Đông, huyện Phú Tân, tỉnh An Giang
Khảo sát và phân tích định lượng để tìm hiểu sự khác biệt của các yếu tố môi trường đào tạo, đặc điểm cá nhân và KQHT ở hai trường và so sánh để tìm hiểu sự khác biệt ở hai môi trường giáo dục khác nhau
tài liệu hot trong mục này
Luận văn về các tác nhân ảnh hưởng đến kết quả học tập của sinh viên chính quy trường Đại Học Kinh Tế- TP HCM
Luận văn thạc sỹ: Phân tích và đánh giá chiến lược kinh doanh tại công ty sữa Vinamilk
Phân lập và xác định được một số đặc tính sinh học của vi khuẩn Streptococcus spp. phục vụ cho nghiên cứu kit chẩn đoán và vacxin phòng bệnh xuất huyết trên cá rô phi tại một số tỉnh miền Bắc
Luận văn thạc sĩ: Tổng quan về thị trường chứng khoán Việt Nam và các giải pháp nhằm hạn chế rủi ro trên thị trường chứng khoán Việt Nam
Luận văn thạc sĩ tôn giáo học: Quản lý nhà nước về hoạt động quản lý tôn giáo tại TP.Hồ Chí Minh- thành tựu, hạn chế và vấn đề đặt ra
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!
xem nhiều trong tuần
Giáo trình Quản trị học của Đại học kinh tế quốc dân
LÝ LUẬN XUẤT KHẨU TƯ BẢN VÀ XUẤT KHẨU TƯ BẢN TẠI VIỆT NAM
MẪU GIỚI THIỆU CHUYỂN SINH HOẠT HỘI
Mẫu slide thuyết trình ngành luật
Tâm lý xã hội VÀ Hệ tư tưởng
Mẫu slide thuyết trình chủ đề bóng đá
yêu cầu tài liệu
Giúp bạn tìm tài liệu chưa có

×
