
Home
Luận văn - báo cáo
Khoa học tự nhiên
NGHIÊN CỨU ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ RÔTÔ DÂY QUẤN BẰNG PHƯƠNG PHÁP ĐIỆN TRỞ XUNG Ở MẠCH RÔTO
NGHIÊN CỨU ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ RÔTÔ DÂY QUẤN BẰNG PHƯƠNG PHÁP ĐIỆN TRỞ XUNG Ở MẠCH RÔTO

LUẬN VĂN TỐT NGHIỆP
ĐỀ TÀI
Điều chỉnh tốc độ động cơ
không đồng bộ Rôtô dây
quấn bằng phương pháp điện
trở xung ở mạch Rôtô

Giáo viên hướng dẫn: Nguyễn Trung
Sơn
Sinh viên: Trần Minh Tiếu Trang 1
LỜI NÓI ĐẦU
Trong công nghiệp máy điện không đồng bộ ba pha là loại động cơ
chiếm một tỷ lệ rất lớn so với các loại động cơ khác. Do kết cấu đơn giản, làm
việc chắc chắn, hiệu suất cao, giá thành hạ, nguồn cung cấp lấy ngay trên lưới
công nghiệp, dải công suất động cơ rất rộngt ừ vài trăm W đến hàng ngàn
kW. Tuy nhiên các hệ truyền động có điều chỉnh tốc độ dùng động cơ không
đồng bộ lại có tỷ lệ nhỏ so với động cơ một chiều.
Đó là điều chỉnh tốc độ động cơ không đồng bộ gặp nhiều khó khăn và
dải điều chỉnh hẹp. Nhưng với sự ra đời và phát triển nhanh của dụng cụ bán
dẫn công suất như: Diốt, Triắc tranzitor công suất, Thiristor có cực khoá…
Thì các hệ truyền động có điều chỉnh tốc độ dùng động cơ không đồng bộ mới
được khai thác mạnh hơn.
Xuất phát từ những vấn đề nêu trên và trong khuôn khổ đồ án tốt
nghiệp, bản đồ án này nghiên cứu: "ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG
ĐỒNG BỘ RÔTÔ DÂY QUẤN BẰNG PHƯƠNG PHÁP ĐIỆN TRỞ XUNG Ở MẠCH
RÔTO".
Nội dung của đồ án gồm 5 chương.
1. CHƯƠNG I: TỔNG QUAN VỀ ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG
ĐỒNG BỘ 3 PHA.
2. CHƯƠNG II: TÍNH CHỌN MẠCH ĐỘNG LỰC
3. CHƯƠNG III: TÍNH CHỌN MẠCH ĐIỀU KHIỂN.
4. CHƯƠNG IV: TÍNH CHỌN CẢM BIẾN ĐỂ XÂY DỰNG HỆ KÍN.
5. ĐẶC TÍNH CƠ.
Em xin chân thành cảm ơn thầy "NGUYỄN TRUNG SƠN" đã hướng
dẫn tận tình cho em trong quá trình làm đồ án vừa qua. Đến hôm nay em đã
hoàn thành đồ án của mình. Nhưng vì khả năng và thời gian có hạn nên chắc
chắn vẫn còn sai sót nhất định.
Em cũng xin tỏ lòng biết ơn sâu sắc đối với các thầy cô giáo trong bộ
môn thiết bị điện - điện tử trường Đại học Bách Khoa Hà Nội đã nhiệt tình
Giáo viên hướng dẫn: Nguyễn Trung
Sơn
Sinh viên: Trần Minh Tiếu Trang 2
giảng dạy giúp đỡ tạo điều kiện trong suốt quá trình học tập và rèn luyện của
em để đến hôm nay em hoàn thành nhiệm vụ học tập của mình.
Sinh viên
Trần Minh Tiếu
Giáo viên hướng dẫn: Nguyễn Trung
Sơn
Sinh viên: Trần Minh Tiếu Trang 3
CHƯƠNG I:
TỔNG QUAN VỀ ĐIỀU CHỈNH
TỐC ĐỘ ĐCKĐB 3 PHA
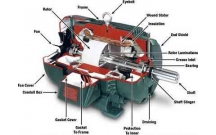
I. GIỚI THIỆU ĐCKĐB VÀ KẾT CẤU:
Động cơ không đồng bộ ba pha được sử dụng rộng rải trong công
nghiệp từ công suất nhỏ đến công suất trung bình và chiếm tỷ lệ rất lớn so với

Giáo viên hướng dẫn: Nguyễn Trung
Sơn
Sinh viên: Trần Minh Tiếu Trang 4
động cơ khác. Sở dĩ như vậy là do động cơ KĐB có kết cấu đơn giản, dể chế
tạo, vận hành an toàn, sử dụng nguồn cấp trực tiếp từ lưới điện xoay chiều 3
fa. Tuy nhiên trước đây các hệ truyền động cơ không đồng bộ có điều chỉnh
tốc độ lại chiếm tỷ lệ rất nhỏ, đó là do việc điều chỉnh tốc độ động cơ KĐB
có khó khăn hơn động cơ một chiều. Trong thời gian gần đây, do phát triển
công nghiệp chế tạo bán dẫn công suất và kỹ thuật điện tử tin học, động cơ
KĐB mới được khai thác các ưu điểm của mình. Nó trở thành hệ truyền động
cạnh tranh có hiệu quả với hệ truyền động tiristo, động cơ một chiều.
II. ĐẶC TÍNH CƠ CỦA ĐỘNG CƠ KĐB ROTO DÂY QUẤN:
• Để thành lập đặc tính cơ,ta cần đưa ra một số giả thiết sau:
- 3 pha của động cơ là đối xứng.
- Các thông số của mạch không thay đổi, nghĩa là không phụ thuộc
nhiệt độ, điện trở của mạch roto không phụ thuộc vào tần số của dòng điện
trong nó, mạch từ không bảo hoà, do đó điện kháng của cuộc dây stato X1 và
roto X2 không thay đổi.
- Tổng dẫn của mạch dòng từ hoá không thay đổi, dòng điện từ hoá IM
không phụ thuộc vào phụ tải mà chỉ phụ thuộc vào điện áp đặt vào stato của
động cơ.
- Bỏ qua các tổn thất của ma sát.
- Điện áp lưới hoàn toàn hình sin và đối xứng.
Như vậy ta có sơ đồ thay thế một pha của động cơ.
Trong đó: XM, X1,X2’ các điện kháng của mạch từ hoá, Stato và Rôto qui
đổi về Stato (Ω).
U
f
X1
X
μ
I1 r1
I2’
X’2
r
μ
I
μ
S
r'
2
S
Rf
'
[Hình 1.1] Sơ đồ thay thế một pha của động cơ KĐB roto dây

Giáo viên hướng dẫn: Nguyễn Trung
Sơn
Sinh viên: Trần Minh Tiếu Trang 5
rM, r1, r’2: các điện trở tác dụng của mạch từ hoá của cuộn dây stato,
rôto đã qui đổi về stato (Ω).
R’f điện trở phụ (nếu có) mắc thêm vào mỗi pha của rôto đã qui đổi về
stato (Ω).
Uf trị số hiệu dụng của điện áp pha ở stato (V).
IM,I1,I2 Dòng điện từ hoá , stato, rôto đã qui đổi về stato (A).
S độ trượt của động cơ.
S = (
ω
0-
ω
)/
ω
0 (1.1)
Với
ω
0 vận tốc góc của từ trường quay, còn gọi là tốc độ đồng bộ (rad).
ω
0 = p
f
π
2 (1.2).
f: tần số điện áp nguồn đặc vào stato (Hz).
P: số đôi cực của động cơ.
ω
: tốc độ góc của rôto (rad/s).
Từ phương trình 1.1 và phương trình 1.2 suy ra:
ω
=
ω
0(1-s) = p
f
π
2(1-s) (1.3).
Mặt khác, từ sơ đồ thay thế ( hình 1.1) ta có, trị số hiệu dụng của dòng
điện roto đã qui đổi về stato.
I’2 =
()( )
f
22
12 1 2
U
rr X X'+++ (1.4).
Công suất điện từ chuyển từ stato sang rôto
P
12 = Mdt .
ω
0
Với Mdt : mô men điện từ của động cơ.
Nếu bỏ qua các tổn thất thì Mdt = Mcơ = M.
Công suất đó chia ra hai thành phần : công suất đưa ra trục động cơ là
Pcơ và công suất tổn hao đồng trong rôto ΔP2 nghĩa là :
P12 = Pcơ+ΔP2 .
Hay M
ω
0 = M
ω
+ ΔP2
1'

có thể bạn quan tâm

GIỚI THIỆU VÀ THIẾT KẾ VỀ ĐỘNG CƠ KHÔNG ĐỒNG BỘ ROTO DÂY QUẤN
58
3.461
785
Kỹ thuật
58
(New)

Luận án: Vấn đề chung của động cơ không đồng bộ và thiết kế, tính toá...
94
1.369
497
Kỹ thuật
94
(New)

ĐỘNG CƠ ĐIỆN MỘT CHIỀU VÀ CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ VÀ XÂY DỰN...
54
1.332
473
Kỹ thuật
54
(New)
XÂY DỰNG VÀ THIẾT KẾ HỆ THỐNG ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ...
66
1.317
480
Kỹ thuật
66
(New)
Tìm hiểu cấu tạo, nguyên lý hoạt động, các phương trình đặc tính cơ, v...
39
1.184
514
Kỹ thuật
39
(New)

Khái quát về tủ sấy bằng điện trở, thiết kế mạch động lực, thiết kế mạ...
94
1.473
421
Kỹ thuật
94
(New)

Nghiên cứu những vấn đề liên quan đến các hoạt động về tổ chức quản lý...
120
1.244
505
Thạc sĩ cao học
120
(New)
Luận án: Các phương pháp mở, khoá Thyristor và một số mạch điều khiển...
59
3.009
625
Kỹ thuật
59
(New)
thông tin tài liệu
Trong công nghiệp máy điện không đồng bộ ba pha là loại động cơ chiếm một tỷ lệ rất lớn so với các loại động cơ khác. Do kết cấu đơn giản, làm việc chắc chắn, hiệu suất cao, giá thành hạ, nguồn cung cấp lấy ngay trên lưới công nghiệp, dải công suất động cơ rất rộngt ừ vài trăm W đến hàng ngàn kW. Tuy nhiên các hệ truyền động có điều chỉnh tốc độ dùng động cơ không đồng bộ lại có tỷ lệ nhỏ so với động cơ một chiều.
Mở rộng để xem thêm
tài liệu mới trong mục này
Tạo chủng Rhodococcus opacus B4 có biểu hiện của enzyme n- alkane monooxygenase tăng so với dòng chƣa biến nạp, bằng cách tạo plasmid chứa gene alkB1/alkB2 rồi chuyển plasmid đó vào R. opacus B4
Khảo sát tỉ lệ nhiễm Coliforms và E. coli trong nƣớc uống, nước giải khát có gas, nước uống có cồn đang lƣu hành trên địa bàn Thành phố Hồ Chí Minh.
Sản xuất được chế phẩm diệt ruồi hiệu quả mà không gây độc đối với con ngƣời và thân thiện với môi trường
Nghiên cứu mới để bảo vệ vi khuẩn probiotic và nâng cao giá trị của sữa chua về chỉ tiêu vi sinh vật.
Sản xuất kháng thể thỏ kháng ovalbumin và tinh chế kháng thể (IgG) kháng ovalbumin
tài liệu hot trong mục này
Tiểu luận: Chân dung, hình ảnh nhận thức khi tới thăm bảo tàng chứng tích chiến tranh
Tiểu luận: Nem chua và các yếu tố cấu thành lên nem chua
ÁP DỤNG KĨ THUẬT REAL-TIME PCR SỬ DỤNG DISPLACING PROBE ĐỂ CHẨN ĐOÁN VIRUS HBV KHÁNG THUỐC LAMUVIDINE Ở BỆNH NHÂN VIÊM GAN SIÊU VI B
Tổng quan về nguyên liệu tôm, tôm chua
NGHIÊN CỨU VẮC-XIN PHÒNG BỆNH THAN DO VI KHUẨN Bacillus anthracis
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!

×
