
Nghiên cứu Robot dò line

Đồ án môn học 1 Page 1
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
Robot dò line
LỜI MỞ ĐẦU

Đồ án môn học 1 Page 2
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
Lời đầu tiên, em xin chân thành cảm ơn thầy Nguyễn Thanh Phương và thầy
Phạm Quốc Phương đã giúp đỡ em rất nhiều trong quá trình thực hiện đồ án này!
Đồ án môn học 1 là đồ án đầu tiên trong chương trình học của em, nên đây là
đồ án rất quan trọng, là nền tảng để em thực hiện những đồ án sau này.
Trong quá trình thực hiện đồ án, được sự giúp đỡ tận tình của thầy Nguyễn
Thanh Phương và thầy Phạm Quốc Phương em đã thu được nhiều kiến thức quý
báu giúp em rất nhiều trong quá trình học và làm việc của em trong tương lai :
được tiếp xúc với vi điều khiển họ AVR ( Atmega8), biết cách thiết kế mạch in
bằng phần mềm OrCaD, thi công mạch in…v.v.
Trong quá trình thực hiện đồ án, do em chưa có nhiều kinh nghiệm nên không
tránh khỏi những sai sót. Mong nhận được sự góp ý của các thầy để được hoàn
thiện hơn.
Một lần nữa em xin chân thành cảm ơn sự quan tâm giúp đỡ của quý thầy trong
quá trình thực hiện đồ án để em hoàn thành đồ án này và mong được sự giúp đỡ
của các thầy trong các đồ án sau.
SVTH
Phạm Quốc Gia
MỤC LỤC
Đồ án môn học 1 Page 3
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
Giới thiệu…………………………………………………….4
I. Tổng quan………………………………………………...4
1. Cấu trúc ……………………………………………4
2. Hệ thống điều khiển……………………………… ..4
3. Sơ đồ nguyên lý hệ thống điều khiển……………...5
II. Hoạt động…………………………………………………7
1. Đặc tả đường đua…………………………………...7
2. Hoạt động của động cơ Servo………………………10
3. Hoạt động của sensor……………………………….11
4. Giải thuật……………………………………………12
5. Code điều khiển…………………………………….13
III. Ứng dụng, hạn chế và hướng giải quyết…………………...28
Đồ án môn học 1 Page 4
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
GIỚI THIỆU
Tự động hóa là tổng hoà của nhiều lĩnh vực như cơ khí, điều khiển, công nghệ
thông tin và cơ điện tử. Các lĩnh vực này kết hợp lại với nhau tạo thành các hệ thống
tự động hóa và cao hơn nữa là tự động hóa toàn bộ quá trình sản xuất. Ngành công
nghiệp tự động hóa ngày càng có vai trò quan trọng và hết sức cần thiết để đáp ứng
các mục tiêu phát triển kinh tế, nhất là trong tiến trình công nghiệp- hiện đại hóa
nhanh như hiện nay. Nó đòi hỏi một nguồn nhân lực có trình độ cao để vận hành.
Trên thế giới hiện nay có rất nhiều loại robot:
Quy mô lớn như: Những cánh tay máy trong các dây chuyền sản xuất, những hệ thống
sản xuất tự động.
Nhỏ hơn là những robot có khả năng di chuyển, làm những công việc nguy hiểm thay
thế con người, robot giúp người già, robot bán hàng…v.v.
Trong đồ án lần này em thực hiện làm robot dò line, so với những robot trên thì
nó chỉ là 1 robot nhỏ, đơn giản nhưng đây là nền tảng để em làm được những cái lớn
hơn, có ích hơn trong quá trình học tập và làm việc của em sau này.
I.
Tổng quan:
1. Cấu trúc:
Cấu trúc của robot gồm:
- Hai bánh xe sau được nối với hai motor truyền động cho xe.
- Hai bánh xe trước được điều khiển bẳng động cơ Servo
- Bo mạch chủ dùng chíp AVR Atmega8 để tiếp nhận tín hiệu từ sensor và
phát lệnh điều khiển hoạt động của xe.
- Hệ thống dò đường ( Sensor) gồm 6 cặp quang trở- led siêu sáng.

Đồ án môn học 1 Page 5
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
2. Hệ thống điều khiển:
Bo mạch chủ sử dụng chip AVR Atmega8
Hình 1: Chip Atmega8
3. Sơ đồ nguyên lý mạch điều khiển:
• Mạch Nguồn:
Hình 2: Sơ đồ mạch nguồn
Mạch nguồn dùng ic ổn áp 7805 từ nguồn 12 v để tạo ra điện áp 5v cung cấp
cho vi điều khiển và cầu chì bảo vệ ic.

Đồ án môn học 1 Page 6
GVHD: TS.Nguyễn Thanh Phương SVTH: Phạm Quốc Gia
ThS. Phạm Quốc Phương Lớ p 08DDC-HUTECH
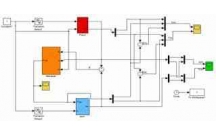
• Mạch điều khiển:
Hình 3: Sơ đồ mạch điều khiển
Tín hiệu từ sensor được đọc về các chân trên Port.C của IC.
Vì chip Atmega8 chỉ có 2 chân PWM nên PIND.4 được dùng làm chân điều chế xung
để điều khiieenr góc quay của động cơ RC Servo.
Bốn PIN 0,5,6,7 của Port.D được dùng để đưa tín hiệu điều khiển 2 cầu H L298_A và
L298_B.
Hai chân PINB.1, PINB.2 điều chế xung PWM điều khiển 2 cầu H qua đó điều chỉnh
tốc độ của hai động cơ.

có thể bạn quan tâm

Đồ án tốt nghiệp: Những kiến thức cơ bản về robot - nghiên cứu, thiết...
87
1.055
529
Khoa học tự nhiên
87
(New)

Nghiên cứu và xây dựng Robot di động bám tường
62
825
298
Khoa học tự nhiên
62
(New)
BÀI TOÁN ĐỘNG HỌC TAY MÁY CỦA ROBOT
87
1.086
473
Kỹ thuật
87
(New)
Luận văn thạc sĩ: Tổng quan về mạng NƠRON nhân tạo và ứng dụng nó vào...
88
1.252
415
Khoa học tự nhiên
88
(New)
Luận văn thạc sỹ: ĐH Thái Nguyên- Lộ trình cho Robot và bài toán xác đ...
88
826
562
Thạc sĩ cao học
88
(New)
Trình bày tổng quan về cơ sở của mạng nơron nhân tạo, và nêu khái quát...
88
1.014
362
Kinh tế quản lý
88
(New)

Luận văn kĩ sư sinh học: Chế biến nước ép dứa, thăng long đóng hộp- Ng...
99
866
333
Kinh tế - Thương mại
99
(New)

Đề tài nghiên cứu: Tổng quan, đối tượng, nội dung, phương pháp và kết...
68
2.071
537
Kinh tế quản lý
68
(New)
thông tin tài liệu
Trong mỗi IC L298 được tích hợp 2 cầu H, mỗi cầu H chịu được dòng 2 Ampe. Khi nối các chân có cùng chức năng của 2 cầu H trên IC với nhau thì IC có thể cung cấp được dòng 4 Ampe đủ để cho động cơ hoạt động hết công suất
Mở rộng để xem thêm
tài liệu mới trong mục này
SƠ LƯỢC QUA VỀ TRUYỀN HÌNH ĐEN TRẮNG VÀ KHUẾCH ĐẠI HÌNH VÀ ĐÈN HÌNH (VIDEO AMP - CRT)
GIỚI THIỆU VÀ THIẾT KẾ VỀ ĐỘNG CƠ KHÔNG ĐỒNG BỘ ROTO DÂY QUẤN
Giới thiệu tổng quan về tổng đài SPC, tổng đài NEAX61-E và nghiên cứu Modul giao tiếp trung kế số DTIM
NGHIÊN CỨU THIẾT KẾ ĐỘNG CƠ KHÔNG ĐỒNG BỘ VẠN NĂNG
NGHIÊN CỨU BỘ CHẤN LƯU 3 CHỨC NĂNG CHO ĐÈN NEON
tài liệu hot trong mục này
Tiểu luận quản trị học: Khái niệm quản trị, chức năng quản trị, giới thiệu về MICROSOFT, TOYOTA VÀ VINAMILK và phân tích chức năng quản trị hệ thống
HỆ THỐNG ĐIỆN TRÊN TÀU THỦY, TRẠM PHÁT TÀU 700 TEU VÀ BẢNG ĐIỆN CHÍNH TÀU 700 TEU.
SƠ LƯỢC QUA VỀ TRUYỀN HÌNH ĐEN TRẮNG VÀ KHUẾCH ĐẠI HÌNH VÀ ĐÈN HÌNH (VIDEO AMP - CRT)
GIỚI THIỆU VÀ THIẾT KẾ VỀ ĐỘNG CƠ KHÔNG ĐỒNG BỘ ROTO DÂY QUẤN
Tiểu luận: Mạng Lan không dây và công cụ bảo vệ mạng Lan không dây
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!
xem nhiều trong tuần
CHÍNH SÁCH PHÁT TRIỂN: Bài 3 - Lý thuyết phát triển
Tiếng Anh lớp 3 - Đề thi học kỳ 2 trường Tiểu Học Nguyễn Khuyến, Đắk Lắk
Hướng dẫn chuyển Bookmarks từ Firefox sang Chrome
Giải bài tập SBT Tiếng Anh lớp 9 mới Unit 7
Làm gì để tránh biến chứng bệnh tiểu đường
Hướng dẫn đặt mật khẩu Facebook 2 lớp bằng Code Generator
yêu cầu tài liệu
Giúp bạn tìm tài liệu chưa có

×
