
Nghiên cứu và xây dựng Robot di động bám tường

ĐẠI HỌC QUỐC GIA TP. HỒ CHÍ MINH
TRƯỜNG ĐẠI HỌC BÁCH KHOA
KHOA CƠ KHÍ
BOÄ MOÂN CÔ ÑIEÄN TÖÛ
šš&››
BK
LUẬN VĂN TỐT NGHIỆP ĐẠI HỌC
ROBOT DI ĐỘNG THEO
DẤU TƯỜNG
Sinh viên thực hiện : DOÃN MINH ĐĂNG
MSSV: P9900012
Cán bộ hướng dẫn : TS. NGUYỄN TẤN TIẾN
CHƯƠNG TRÌNH ĐÀO TẠO KỸ SƯ CHẤT LƯỢNG CAO
KHÓA 1: 1999 - 2004
TP.Hồ Chí Minh, 07/2004
Lôøi caûm ôn
Ñeå thöïc hieän ñeà taøi, taùc giaû ñaõ nhaän ñöôïc raát nhieàu söï chæ daãn, giuùp ñôõ vaø
ñoäng vieân quyù baùu cuûa nhieàu ngöôøi, thieáu moät trong caùc söï giuùp ñôõ ñoù cuõng coù theå
laøm cho ñeà taøi khoâng ñaït keát quaû nhö hieän nay.
Tröôùc heát, em xin baøy toû loøng caûm ôn saâu saéc ñoái vôùi thaày TS. Nguyeãn Taán
Tieán, ngöôøi thaày höôùng daãn ñaõ taän tình chæ cho em phöông phaùp nghieân cöùu khoa
hoïc, thaày cuõng ñaõ cung caáp cho em raát nhieàu kieán thöùc chuyeân saâu ñeå thöïc hieän ñeà
taøi.
Em cuõng voâ cuøng caûm ôn coâ Th.S Traàn Thò Ngoïc Dung vaø caùc thaày coâ ôû
chöông trình ñaøo taïo Kyõ sö chaát löôïng cao, thaày TS. Nguyeãn Vaên Giaùp vaø caùc thaày
coâ ôû boä moân Cô Ñieän Töû, Khoa Cô khí, Tröôøng Ñaïi Hoïc Baùch Khoa Tp.HCM ñaõ
tham gia quaù trình ñaøo taïo vaø höôùng daãn em trong suoát thôøi gian hoïc ñaïi hoïc, nhôø
caùc thaày coâ maø em coù ñuû kieán thöùc vaø loøng töï tin ñeå thöïc hieän ñeà taøi nghieân cöùu
naøy cuõng nhö caùc ñeà taøi trong töông lai.
Beân caïnh ñoù, söï hôïp taùc vaø giuùp ñôõ cuûa baïn beø vaø caùc theá heä ñaøn anh cuõng
giuùp toâi raát nhieàu trong vieäc thöïc hieän ñeà taøi naøy. Em xin ñöôïc caûm ôn KS. Löu
Tuaán Anh, Khoa Coâng ngheä Vaät Lieäu, ngöôøi ñaõ höôùng daãn em ñi vaøo nghieân cöùu
veø robot, Th.S Traàn Vaên Tuøng vaø caùc baïn ôû Phoøng thí nghieäm Thieát Keá Maùy ñaõ
tích cöïc giuùp ñôõ em trong thôøi gian thöïc hieän ñeà taøi. Toâi cuõng xin chaân thaønh caûm
ôn caùc baïn cuøng hoïc lôùp Cô Ñieän Töû – Vieät Phaùp 99, ñaëc bieät laø caùc baïn Ñoaøn
Hieäp, Nguyeãn Anh Kieät, Phaïm Huyønh Phong, Nguyeãn Minh Trung, nhöõng ngöôøi
cuøng nghieân cöùu veà robot di ñoäng ñaõ cho toâi caùc yù kieán ñoùng goùp quyù giaù!
Con cuõng xin caûm ôn gia ñình ñaõ luoân chaêm soùc vaø quan taâm ñeán vieäc hoïc cuûa
con, con voâ cuøng caûm ôn vaø luoân töï haøo vì coù Boá, Meï, Chò luoân ñoäng vieân con
trong quaù trình hoïc taäp.
Vaø cuoái cuøng, toâi xin göûi lôøi caûm ôn tôùi nhöõng ngöôøi ñaõ tham gia giuùp ñôõ toâi
trong quaù trình thöïc hieän luaän vaên maø toâi chöa neâu teân ôû ñaây, söï giuùp ñôõ cuûa hoï duø
ít hay nhieàu cuõng ñoùng goùp moät phaàn vaøo keát quaû thöïc hieän ñeà taøi toát nghieäp naøy.
Tp. Hoà Chí Minh, ngaøy 19 thaùng 7 naêm 2004
Doaõn Minh Ñaêng
i
Muïc luïc
Lôøi caûm ôn ..........................................................................................................................................................
Muïc luïc...............................................................................................................................................................i
Danh muïc caùc hình veõ ...............................................................................................................................iii
Danh muïc caùc baûng.....................................................................................................................................iii
Toùm taét ñeà taøi................................................................................................................................................iv
Abstract.............................................................................................................................................................v
1 Toång quan vaø ñaët vaán ñeà .......................................................................................................................1
1.1 Giôùi thieäu chung veà robot........................................................................................1
1.2 Toång quan veà caùc baøi toaùn cuûa robot di ñoäng [5] ......................................................4
1.3 Baøi toaùn di chuyeån theo töôøng vaø caùc nghieân cöùu lieân quan ......................................5
1.3.1 Giôùi thieäu baøi toaùn ........................................................................................6
1.3.2 Moâ hình toaùn hoïc..........................................................................................6
1.3.3 Muïc tieâu ñieàu khieån......................................................................................8
1.4 Phöông phaùp giaûi quyeát vaán ñeà................................................................................8
2 Toùm taét thuaät toaùn ñieàu khieån............................................................................................................9
2.1 Moâ hình boä ñieàu khieån ............................................................................................9
2.2 Ñaëc tính boä ñieàu khieån (theo keát quaû chöùng minh vaø moâ phoûng) ...............................9
3 Thieát keá vaø thöïc hieän phaàn cöùng....................................................................................................10
3.1 Kieán truùc robot .....................................................................................................10
3.2 Vi ñieàu khieån PIC 16F877[13]...............................................................................11
3.3 Thieát keá khung giao tieáp I2C .................................................................................13
3.3.1 Lyù do söû duïng giao tieáp I2C.........................................................................13
3.3.2 Khung giao tieáp I2C trong robot...................................................................13
3.4 Thieát keá ñeá di chuyeån vaø boä ñieàu khieån ñoäng cô....................................................14
3.4.1 Thieát keá ñeá di chuyeån .................................................................................14
3.4.2 Boä ñieàu khieån PID [15] ...............................................................................14
3.5 Thieát keá caûm bieán.................................................................................................16
3.5.1 Moâ hình toaùn hoïc cuûa caûm bieán ...................................................................16
3.5.2 Thöïc hieän caûm bieán ....................................................................................17
3.6 Thieát keá caùc maïch ñieän töû .....................................................................................19
3.6.1 Maïch module master...................................................................................19
3.6.2 Maïch module slave.....................................................................................20
4 Thöïc hieän boä ñieàu khieån vaø kieåm chöùng giaûi thuaät............................................................... 22
4.1 Sô ñoà giaûi thuaät chöông trình .................................................................................22
4.1.1 Giaûi thuaät cho master module ......................................................................23
4.1.2 Giaûi thuaät cho slave module ........................................................................24
4.2 Tieán haønh thí nghieäm............................................................................................25
4.3 So saùnh caùc keát quaû moâ phoûng vaø thí nghieäm .........................................................26
4.3.1 So saùnh keát quaû moâ phoûng baèng Matlab vôùi keát quaû thí nghieäm ....................26
4.3.2 Caùc nhaän xeùt boå sung..................................................................................28
5 Keát luaän......................................................................................................................................................33
ii
5.1 Ñoä thích hôïp cuûa giaûi thuaät....................................................................................33
5.2 Nhöõng haïn cheá cuûa ñeà taøi......................................................................................33
5.2.1 Veà vieäc cheá taïo phaàn cöùng ..........................................................................33
5.2.2 Nhöõng hieän töôïng aûnh höôûng ñeán keát quaû vaø caùch khaéc phuïc........................33
5.3 Höôùng nghieân cöùu tieáp..........................................................................................34
TAØI LIEÄU THAM KHAÛO......................................................................................................................35
PHUÏ LUÏC A .................................................................................................................................................37
PHUÏ LUÏC B..................................................................................................................................................39
iii
Danh muïc caùc hình veõ
Hình 1.1 Moät soá hình aûnh veà robot vaø caùc öùng duïng................................................4
Hình 1.2 Moâ hình baøi toaùn robot di ñoäng baùm töôøng................................................7
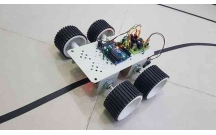
Hình 3.1 Sô ñoà khoái cuûa all-following mobile robot...............................................11
Hình 3.2 Sô ñoà chaân PIC 16F877............................................................................12
Hình 3.3 Moâ hình ñeá di chuyeån laät ngöôïc...............................................................14
Hình 3.4 Boä ñieàu khieån PID vaän toác theo moâ hình song song................................14
Hình 3.5 Ñaùp öùng cuûa boä ñieàu khieån PID vôùi kp=8, ki=1, kd=1.............................15
Hình 3.6 Ñaùp öùng cuûa boä ñieàu khieån PID vôùi kp=8.2, ki=1, kd=0.8.......................16
Hình 3.7 Moâ hình toaùn hoïc cuûa caûm bieán...............................................................17
Hình 3.8 Phaàn ñeäm tín hieäu töø encoder vaøo vi ñieàu khieån ôû module master..........18
Hình 3.9 Hình chuïp module caûm bieán.....................................................................18
Hình 3.10 Sô ñoà nguyeân lyù cuûa maïch module master.............................................19
Hình 3.11 Hình chuïp module master.......................................................................20
Hình 3.12 Sô ñoà nguyeân lyù khoái xöû lyù chính cuûa module slave..............................20
Hình 3.13 Sô ñoà nguyeân lyù khoái khueách ñaïi coâng suaát cuûa module slave..............21
Hình 3.14 Hình chuïp module slave.........................................................................21
Hình 4.1 Löu ñoà giaûi thuaät cuûa master module.......................................................23
Hình 4.2 Löu ñoà giaûi thuaät cuûa slave module..........................................................24
Hình 4.3 Moâ hình thí nghieäm...................................................................................26
Hình 4.4 So saùnh ñoà thò cuûa vaän toác robot...............................................................27
Hình 4.5 So saùnh ñoà thò cuûa sai soá khoaûng caùch.....................................................27
Hình 4.6 So saùnh ñoà thò cuûa sai soá goùc....................................................................28
Hình 4.7 Giaù trò cuûa caûm bieán.................................................................................29
Hình 4.8 Giaù trò vaän toác goùc cuûa robot vaø vaän toác goùc (öôùc löôïng) cuûa töôøng.......29
Hình 4.9 Bieán ñoåi cuûa caùc sai leäch trong quaù trình hoaït ñoäng................................30
Hình 4.10 Giaù trò vaän toác ra leänh cho 2 baùnh xe.....................................................30
Hình 4.11 So saùnh caùc ñoà thò e1 vaø e2 cuûa hai thí nghieäm.......................................32
Danh muïc caùc baûng
Baûng 1.1 Toùm taét lòch söû phaùt trieån cuûa coâng ngheä robot.........................................2
Baûng 4.1 Thoâng soá thí nghieäm................................................................................26
Baûng 4.2 Thoâng soá cuûa 2 thí nghieäm (TN) duøng ñeå so saùnh...................................31
Baûng 5.1 Caùc hieän töôïng aûnh höôûng ñeán keát quaû vaø caùch khaéc phuïc....................33
iv
Toùm taét ñeà taøi
Trong thôøi ñaïi coâng nghieäp ngaøy nay, Robot ngaøy caøng ñöôïc söû duïng phoå
bieán trong saûn xuaát cuõng nhö trong cuoäc soáng cuûa con ngöôøi. Robot ñaõ coù moät vò trí
quan troïng khoù coù theå thay theá ñöôïc, noù giuùp con ngöôøi ñeå laøm vieäc trong caùc ñieàu
kieän nguy hieåm, khoù khaên. Ngoaøi ra, Robot coøn ñöôïc duøng vaøo caùc lónh vöïc thaùm
hieåm khoâng gian, quaân söï, giaûi trí… Lónh vöïc Robot di ñoäng ñang ngaøy caøng chieám
ñöôïc söï quan taâm cuûa caùc nhaø nghieân cöùu vaø xaõ hoäi. Töø tình hình thöïc teá ñoù, vieäc
xaây döïng caùc chöông trình hoaït ñoäng cho caùc Robot laø ñieàu thieát yeáu ñaëc bieät ñoái
vôùi caùc Robot di ñoäng. Baøi toaùn Robot di ñoäng baùm töôøng (wall-following problem)
laø moät trong caùc baøi toaùn thöôøng gaëp cuûa Robot kieåu phaûn xaï (reactive paradigm),
noù ñaõ ñöôïc giaûi baèng nhieàu caùch khaùc nhau. Trong ñeà taøi "Robot di ñoäng theo daáu
töôøng", baøi toaùn Robot di ñoäng baùm töôøng ñöôïc giaûi quyeát baèng moät boä ñieàu khieån
hoài tieáp ñaày ñuû traïng thaùi maø keát quaû ñaõ ñöôïc chöùng minh baèng moâ phoûng. Moät
caûm bieán tieáp xuùc duøng caùc encoder ñöôïc taïo ra ñeå söû duïng cho robot. Moâ hình
robot ñöôïc cheá taïo ñeå tieán haønh thí nghieäm nhaèm kieåm chöùng giaûi thuaät cuûa boä
ñieàu khieån. Keát quaû thí nghieäm laø caên cöù ñeå phaùt trieån boä ñieàu khieån daønh cho baøi
toaùn wall-following trong caùc Robot sau naøy.

có thể bạn quan tâm

Đồ án tốt nghiệp: Những kiến thức cơ bản về robot - nghiên cứu, thiết...
87
1.054
529
Khoa học tự nhiên
87
(New)

Đề tài nghiên cứu: Tổng quan, đối tượng, nội dung, phương pháp và kết...
68
2.070
535
Kinh tế quản lý
68
(New)

Những nghiên cứu, phân tích của nhóm về tư tưởng quản trị nhân sự của...
39
907
309
Kinh tế quản lý
39
(New)
Nghiên cứu Robot dò line
28
1.155
718
Kỹ thuật
28
(New)

Tiểu luận: Thông qua việc xếp hạng nhằm dự đoán khả năng thành công tr...
77
749
366
Kinh tế quản lý
77
(New)

Nghiên cứu tư tưởng Hồ Chí Minh về thời kỳ quá độ và Vận dụng tư tưởng...
33
992
383
Lý luận chính trị
33
(New)
BÀI TOÁN ĐỘNG HỌC TAY MÁY CỦA ROBOT
87
1.085
472
Kỹ thuật
87
(New)
Công nghệ bùn hạt hiếu khí khi ứng dụng ở Việt Nam và nghiên cứu để cô...
68
739
320
Kinh tế quản lý
68
(New)
thông tin tài liệu
Trong thời đại công nghiệp ngày nay, Robot ngày càng được sử dụng phổ biến trong sản xuất cũng như trong cuộc sống của con người. Robot đã có một vị trí quan trọng khó có thể thay thế được, nó giúp con người để làm việc trong các điều kiện nguy hiểm, khó khăn
Mở rộng để xem thêm
tài liệu mới trong mục này
Tạo chủng Rhodococcus opacus B4 có biểu hiện của enzyme n- alkane monooxygenase tăng so với dòng chƣa biến nạp, bằng cách tạo plasmid chứa gene alkB1/alkB2 rồi chuyển plasmid đó vào R. opacus B4
Khảo sát tỉ lệ nhiễm Coliforms và E. coli trong nƣớc uống, nước giải khát có gas, nước uống có cồn đang lƣu hành trên địa bàn Thành phố Hồ Chí Minh.
Sản xuất được chế phẩm diệt ruồi hiệu quả mà không gây độc đối với con ngƣời và thân thiện với môi trường
Nghiên cứu mới để bảo vệ vi khuẩn probiotic và nâng cao giá trị của sữa chua về chỉ tiêu vi sinh vật.
Sản xuất kháng thể thỏ kháng ovalbumin và tinh chế kháng thể (IgG) kháng ovalbumin
tài liệu hot trong mục này
Tiểu luận: Chân dung, hình ảnh nhận thức khi tới thăm bảo tàng chứng tích chiến tranh
Tiểu luận: Nem chua và các yếu tố cấu thành lên nem chua
ÁP DỤNG KĨ THUẬT REAL-TIME PCR SỬ DỤNG DISPLACING PROBE ĐỂ CHẨN ĐOÁN VIRUS HBV KHÁNG THUỐC LAMUVIDINE Ở BỆNH NHÂN VIÊM GAN SIÊU VI B
Tổng quan về nguyên liệu tôm, tôm chua
NGHIÊN CỨU VẮC-XIN PHÒNG BỆNH THAN DO VI KHUẨN Bacillus anthracis
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!
xem nhiều trong tuần
10 đề speaking mới ra tháng 9 - tháng 12 ( tỷ lệ ra nhiều nhất)
Hướng dẫn giải bài tập Sách giáo khoa Toán lớp 4: Biểu đồ
Một số thói quen tốt cho bệnh nhân đau dạ dày
Hướng dẫn ghi tập tin hình ảnh ISO vào đĩa CD, DVD
3 ứng dụng giúp cải thiện chất lượng âm thanh trên macOS
Một số mẹo đơn giản để hạn chế email spam
yêu cầu tài liệu
Giúp bạn tìm tài liệu chưa có

×
