
Home
Luận văn - báo cáo
Kinh tế quản lý
Trình bày tổng quan về cơ sở của mạng nơron nhân tạo, và nêu khái quát những ứng dụng của mạng nơron trong công nghệ robot
Trình bày tổng quan về cơ sở của mạng nơron nhân tạo, và nêu khái quát những ứng dụng của mạng nơron trong công nghệ robot

Đ I H C THÁI NGUYÊNẠ Ọ
KHOA CÔNG NGH THÔNG TINỆ
-----------------------------------
ĐINH TH THUÝ QUỲNHỊ
NG D NG M NG N RON TRONG BÀIỨ Ụ Ạ Ơ
TOÁN XÁC Đ NH L TRÌNH CHO ROBOTỊ Ộ
LU N VĂN TH C SĨ CÔNG NGH THÔNG TINẬ Ạ Ệ
THÁI NGUYÊN - 2008

Đ I H C THÁI NGUYÊNẠ Ọ
KHOA CÔNG NGH THÔNG TINỆ
-----------------------------------
ĐINH TH THUÝ QUỲNHỊ
NG D NG M NG N RON TRONG BÀIỨ Ụ Ạ Ơ
TOÁN XÁC Đ NH L TRÌNH CHO ROBOTỊ Ộ
Chuyên ngành: Khoa h c máy tínhọ
Mã s : ố60.48.01
LU N VĂN TH C SĨ CÔNG NGH THÔNG TINẬ Ạ Ệ
NG I H NG D N KHOA H C:ƯỜ ƯỚ Ẫ Ọ
PGS – TS Đ NG QUANG ÁẶ
THÁI NGUYÊN - 2008
M C L CỤ Ụ
1
M C Ụ
L CỤ
DANH M C HÌNHỤ
4
L I NÓI Đ UỜ Ầ
6
CH NG 1 T NG QUAN M NG N RON NHÂN T OƢƠ Ổ Ạ Ơ Ạ ............................
8
1.1. Gi i thi u m ng n ronớ ệ ạ ơ ..........................................................
8
1.1.1. Nh ng ki n trúc tính toán.............................................ữ ế
8
1.1.2. L ch s phát tri n c a m ng n ron...............................ị ử ể ủ ạ ơ
9
1.1.3. N ron sinh h c..............................................................ơ ọ
11
1.1.4. N ron nhân t o..............................................................ơ ạ
12
1.1.5. M ng n ron nhân t o....................................................ạ ơ ạ
14
1.1.6. Ti p c n n ron trong tính toán......................................ế ậ ơ
18
1.2.Ph m vi ng d ng c a m ng n ronạ ứ ụ ủ ạ ơ ....................................
22
1.2.1. Nh ng bài toán thích h p..............................................ữ ợ
22
1.2.2. Các lĩnh v c ng d ng c a m ng n ron.......................ự ứ ụ ủ ạ ơ
24
1.2.3. u nh c đi m c a m ng n ron..................................Ƣ ƣợ ể ủ ạ ơ
25
1.3.M ng Hopfieldạ.......................................................................
26
1.3.1. M ng Hopfield r i r c...................................................ạ ờ ạ
28
1.3.2. M ng Hopfiel liên t c...................................................ạ ụ
28
1.4.M ng n ron trong k thu t robotạ ơ ỹ ậ .......................................
29
1.5.Nh n xétậ.................................................................................
30
CH NG 2 GI I THI U BÀI TOÁN L P L TRÌNH CHO ROBOTƢƠ Ớ Ệ Ậ Ộ ............
32
2.1.Gi i thi u robot nhân t oớ ệ ạ .....................................................
32
2.1.1. T ng quan.....................................................................ổ
32
2.1.2. Gi i pháp thi t k ..........................................................ả ế ế
33
2.2.Bài toán l p l trìnhậ ộ ..............................................................
34
1
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
2.2.1. M đ u..........................................................................ở ầ 34
2.2.2. Các ví d th c t ...........................................................ụ ự ế 37
2.2.3. Bài toán l p l trình chuy n đ ng cho robot................ậ ộ ể ộ 39
2.3. Các thành ph n c b n c a vi c l p l trìnhầ ơ ả ủ ệ ậ ộ ........................ 40
2.3.1. Tr ng thái........................................................................ạ40
2.3.2. Th i gian.........................................................................ờ40
2.3.3. Hành đ ng.......................................................................ộ41
2.3.4. Tr ng thái đ u và tr ng thái k t thúc..............................ạ ầ ạ ế
41
2.3.5. Tiêu chu n......................................................................ẩ41
2.3.6. Gi i thu t........................................................................ả ậ 42
2.3.7. Ng i l p l trình............................................................ƣờ ậ ộ
42
2.3.8. L trình...........................................................................ộ
42
2.3.9. L p l trình chuy n đ ng................................................ậ ộ ể ộ 46
2.4. Không gian c u hìnhấ............................................................... 46
2.4.1. Các khái ni m không gian c u hình................................ệ ấ 46
2.4.2. Mô hình c u hình............................................................ấ
47
2.4.3. Không gian c u hình ch ng ng i..................................ấ ƣớ ạ
56
2.4.4. Đ nh nghĩa chính xác v v n đ l p l trình...................ị ề ấ ề ậ ộ 58
CH NG 3 NG D NG M NG N RON NHÂN T O TRONG BÀI TOÁNƢƠ Ứ Ụ Ạ Ơ Ạ
L P L TRÌNH CHO ROBOTẬ Ộ
.....................................................................
60
3.1. M ng n ron nhân t o và bài toán l p l trìnhạ ơ ạ ậ ộ ...................... 60
3.2. ng d ng m ng Hopfield gi i bài toán l p l trình Ứ ụ ạ ả ậ ộ ............. 62
3.2.1. Khái quát m t s ph ng pháp l p l trình.....................ộ ố ƣơ ậ ộ
62
3.2.2. Ph ng pháp do Yang và Meng đ xu t..........................ƣơ ề ấ
63
3.2.3. Mô hình Yang và Meng c i ti n......................................ả ế 67
3.3. Các k t qu th nghi mế ả ử ệ .......................................................... 69
3.3.1. Ch ng trình Đ mô.........................................................ƣơ ề
69
2
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
3.3.2. So sánh các k t quế ả 71
3.3.3. K t lu nế ậ 73
K T LU NẾ Ậ ................................................................................................................................................75
TÀI LI U THAM KH OỆ Ả .....................................................................................................................76
PH L CỤ Ụ ..................................................................................................................................................77
3
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
DANH M C HÌNHỤ
Hình 1.1: Mô hình n ron sinh h c..............................................................ơ ọ 11
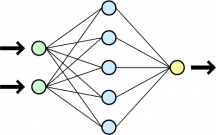
Hình 1.2: Mô hình m t n ron nhân t o......................................................ộ ơ ạ 14
Hình 1.3: Mô hình m ng truy n th ng 1 l p..............................................ạ ề ẳ ớ 16
Hình 1.4: Mô hình m ng truy n th ng nhi u ạ ề ẳ ề
l p.......................................ớ17
Hình 1.5: M nh h i quy 1 l p có n i ạ ồ ớ ố
ng c..............................................ƣợ 17
Hình 1.6: M nh h i quy nhi u l p có n i ạ ồ ề ớ ố
ng c.......................................ƣợ 18
Hình 1.7: Mô hình m ng Hopfield.............................................................ạ27
Hình 2.1: Các thành ph n c u thành Robot................................................ầ ấ 34
Hình 2.2: Kh i Rubitc (a); bài toán d ch chuy n s (b).............................ố ị ể ố 36
Hình 2.3: Gi i thu t kéo 2 thanh thép tách ra.............................................ả ậ 37
Hình 2.4: S d ng Robot di đ ng đ di chuy n ử ụ ộ ể ể
Piano............................... 38
Hình 2.5: (a) ng i l p l trình thi t k gi i thu t l p l ƣờ ậ ộ ế ế ả ậ ậ ộ
trình................... 43
(b) Ng i l p l trình thi t k toàn b ƣờ ậ ộ ế ế ộ
máy ............................... 43
Hình 2.6: M t s l trình và s c i ti n l ộ ố ộ ự ả ế ộ
trình......................................... 44
Hình 2.7: Mô hình có th b c 1 máy có th ch a đ ng 1 máy ứ ậ ể ứ ự
khác.......... 45
Hình 2.8: Không gian c u hình...................................................................ấ47
Hình 2.9: M t Robot đi m di chuy n trong không gian 2D, C – Space làộ ể ể
248
R ................................................................................................................
Hình 2.10: M t Robot đi m di chuy n trong không gian 3D, C – Spaceộ ể ể
348
là R ............................................................................................................
Hình 2.11: M t đa th c l i có th đ c xác đ nh b i phép giao c a cácộ ứ ồ ể ƣợ ị ở ủ
n a m t ử ặ
ph ng.............................................................................................ẳ49
Hình 2.12: D u hi u c a f(x,y) phân chia Rấ ệ ủ 2 thành 3 vùng: f(x,y) <0,
f(x,y) >0, f(x,y) =0...................................................................................... 50
Hình 2.13: (a)Đa di n. (b)Bi u di n các c nh c a m t m t trong đa ệ ể ễ ạ ủ ộ ạ
di nệ53

có thể bạn quan tâm
Luận văn thạc sĩ: Tổng quan về mạng NƠRON nhân tạo và ứng dụng nó vào...
88
1.252
415
Khoa học tự nhiên
88
(New)
Luận văn thạc sỹ: ĐH Thái Nguyên- Lộ trình cho Robot và bài toán xác đ...
88
826
562
Thạc sĩ cao học
88
(New)

Tổng quan về khai phá dữ liệu, mạng nơ ron nhân tạo (Artificial neural...
17
1.612
553
Kỹ thuật
17
(New)

Nghiên cứu tìm hiểu công nghệ MPLS để tiến tới thiết kế mạng ATM MPLS...
100
1.019
377
Kỹ thuật
100
(New)
Khóa luận: ĐH Quốc gia HN- mạng Nơron RBF và thuật toán HDH huấn luyện...
50
954
342
Kỹ thuật
50
(New)

Công nghệ WiMAX và đảm bảo chất lượng dịch vụ QoS cho người dùng đồng...
77
807
358
Kỹ thuật
77
(New)

Tiểu luận: Tổng quan bảo vệ mạng, những lỗ hổng, các kiểu tấn công và...
21
1.391
432
Kỹ thuật
21
(New)

Nghiên cứu những kiến thức về công nghệ mạng riêng ảo MPLS/VPN và ứng...
118
936
1.133
Thạc sĩ cao học
118
(New)
thông tin tài liệu
Nhờ các khả năng: Học, nhớ lại và khái quát hoá từ các mẫu huấn luyện hoặc dữ liệu, mạng nơron nhân tạo trở thành một phát minh mới đầy hứa hẹn của hệ thống xử lý thông tin. Các tính toán nơron cho phép giải quyết tốt những bài toán đặc trƣng bởi một số hoặc tất cả các tính chất sau: Sử dụng không gian nhiều chiều, các tƣơng tác phức tạp, chƣa biết hoặc không thể theo dõi về mặt toán học giữa các biến. Ngoài ra phƣơng pháp này còn cho phép tìm ra nghiệm của những bài toán đòi hỏi đầu vào là các cảm nhận của con ngƣời nhƣ: tiếng nói, nhìn và nhận dạng...
Bài toán lập lộ trình cho robot là một bài toán khá phức tạp, do khi tồn tại và hành động trong môi trƣờng robot sẽ phải chịu rất nhiều sự tác động khác nhau. Tuy nhiên, các tính toán nơron lại cho phép giải quyết tốt các bài toán có nhiều tƣơng tác phức tạp. Vì vậy, ứng dụng mạng nơron trong bài toán xác định lộ trình cho robot sẽ hứa hẹn là một giải pháp hiệu quả góp phần nâng cao hiệu năng làm việc của robot nhờ khả năng di chuyển nhanh chóng, chính xác trong các môi trƣờng làm việc của mình.
Mở rộng để xem thêm
tài liệu mới trong mục này
Khảo sát tỉ lệ nhiễm S. aureus và E. coli nhiễm trong các nhóm thực phẩm như thịt gia súc, các loại cá, thủy sản và các loại rau- nghiên cứu đề xuất quy trình chế biến thực phẩm trong gia đình hợp vệ sinh
Nghiên cứu tình hình quản lý lâm sản ngoài gỗ tại bán đảo Sơn Trà thành phố Đà nẵng
KHU NGHỈ DƯỠNG TỔNG HỢP SÔNG GIÁ VÀ THIẾT KẾ HỆ THỐNG ĐIỆN KHU NGHỈ DƯỠNG
THỰC TRẠNG TỔ CHỨC VÀ THỰC HIỆN QUẢN TRỊ NGUYÊN VẬT LIỆU TẠI CÔNG TY CỔ PHẦN NAGAKAWA VIỆT NAM
PHÂN TÍCH GIAO KHOÁN QUẢN LÝ VÀ BẢO VỆ RỪNG VÀ TRỒNG RỪNG TRÊN ĐỊA BÀN BAN QUẢN LÝ RỪNG PHÒNG HỘ SÔNG MAO - BẮC BÌNH- THUẬN
tài liệu hot trong mục này
Tiểu luận: CT sữa Vinamilk- Phân tích môi trường bên ngoài và phân tích chiến lược tại công ty
Báo cáo thực tập: Siêu thị CO.OPMART- Sự quản lý và thực trạng chăm sóc khách hàng trực tiếp tại đây
Khóa luận tốt nghiệp: Công tác Tuyển dụng, Đào tạo và phát triển nguồn nhân lực tại Công ty TNHH Phương Đông (thực trạng và giải pháp hoàn thiện)
Luận văn: Nhà máy nước Thủ Đức và quy trình vận hành hệ thống xử lý nước cấp
Báo cáo thực tập: Chức năng, nhiệm vụ, quyền hạn, hoạt động, tổ chức của bệnh viện đa khoa huyện Quỳnh Lưu
tài liệu giúp tôi
Nếu bạn không tìm thấy tài liệu mình cần có thể gửi yêu cầu ở đây để chúng tôi tìm giúp bạn!
xem nhiều trong tuần
CHÍNH SÁCH PHÁT TRIỂN: Bài 3 - Lý thuyết phát triển
Tiếng Anh lớp 3 - Đề thi học kỳ 2 trường Tiểu Học Nguyễn Khuyến, Đắk Lắk
Hướng dẫn chuyển Bookmarks từ Firefox sang Chrome
Giải bài tập SBT Tiếng Anh lớp 9 mới Unit 7
Làm gì để tránh biến chứng bệnh tiểu đường
Hướng dẫn đặt mật khẩu Facebook 2 lớp bằng Code Generator
yêu cầu tài liệu
Giúp bạn tìm tài liệu chưa có

×
